Pour lancer la vidéo: Cliquez ici
Ce projet a débuté suite à un petit robot que j’ai découvert dans le labo d'un collègue venant du Canada. Il est simple de construction et est constitué d’un seul vérin. Il permet d’avancer tout droit de manière assez aléatoire.
 |
Robot Gecko 1
Dans le cadre des cours que je donne aux automaticiens, l’idée de créer son « petit frère » a fait son chemin. D’ou le projet Gecko 1. Je voulais garder le même principe de vaccum pour s’accrocher aux fenêtres mais j’avais envie de lui donner la possibilité de tourner à gauche et à droite. Donc au travail…Croquis, dessins, et construction. Ensuite sous forme de projet, c’est une classe d’automaticiens qui a usiné, commandé, câblé et monté le concept. Après un programme relativement complexe, le voilà qui se met à bouger en avant en arrière, à droite, et à gauche avec seulement deux vérins. Victoire!!! Malheureusement impossible de le faire progresser à la verticale. En effet comme seules deux ventouses mal positionnées par rapport à son centre de gravité touchaient la fenêtre, le robot restait bloqué… ! Le voilà obligé de bouger sur une surface horizontale.
Robot Gecko 1 x10
Ensuite pour les portes ouvertes et sur la demande d’un collègue j’ai construit Gecko 1 version x 10. Un énorme robot capable de soulever et promener une personne. Il à été monté et câble par un élève automaticien dans un autre labo.
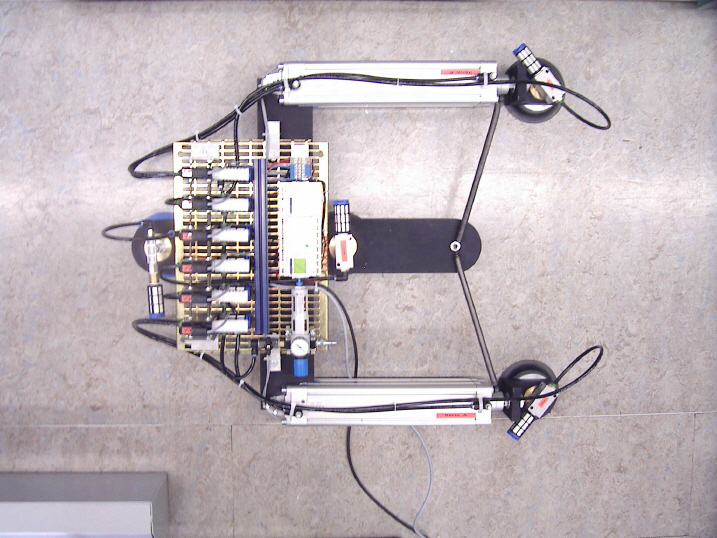
Gecko 2
Puis vient le tour de gecko 2. Cette fois, au défi, les mêmes objectifs que Gecko 1 mais à la verticale et le tout en soulevant chaque patte. Au travail dès le soir à griffonner des croquis, des croquis et des croquis. Puis enfin ! la solution…donc dessins puis construction. Cette fois les grosses pièces ont été créées dans un atelier de mécanique par des élèves mécanicien. Les petites pièces dans un atelier de micro par des élèves micromécaniciens. Le câblage a été effectué par une classe d’automaticiens dans mon labo. Ensuite, nous avons programmé en schéma contact un petit automate. On peut dire que l’automate est au « taquet » quand on sait qu’il contient 28 mémoires, 16 tempos, et 160 lignes disponibles. Et que le programme utilise, 28 mémoires, 16 tempos, et 159 lignes. Oui je sais il reste une ligne de libre… ! Voici Gecko 2 avec ses 4 pattes et ses 8 vérins.
Il fonctionne très bien et à la verticale S.V.P! Son seul problème, c’est le poids des câbles qu’il doit tirer. Mais ça !!!!?
Pour lancer la vidéo: Cliquez ici





















{kind=link}
{kind=link}
{kind=link}
{kind=link}